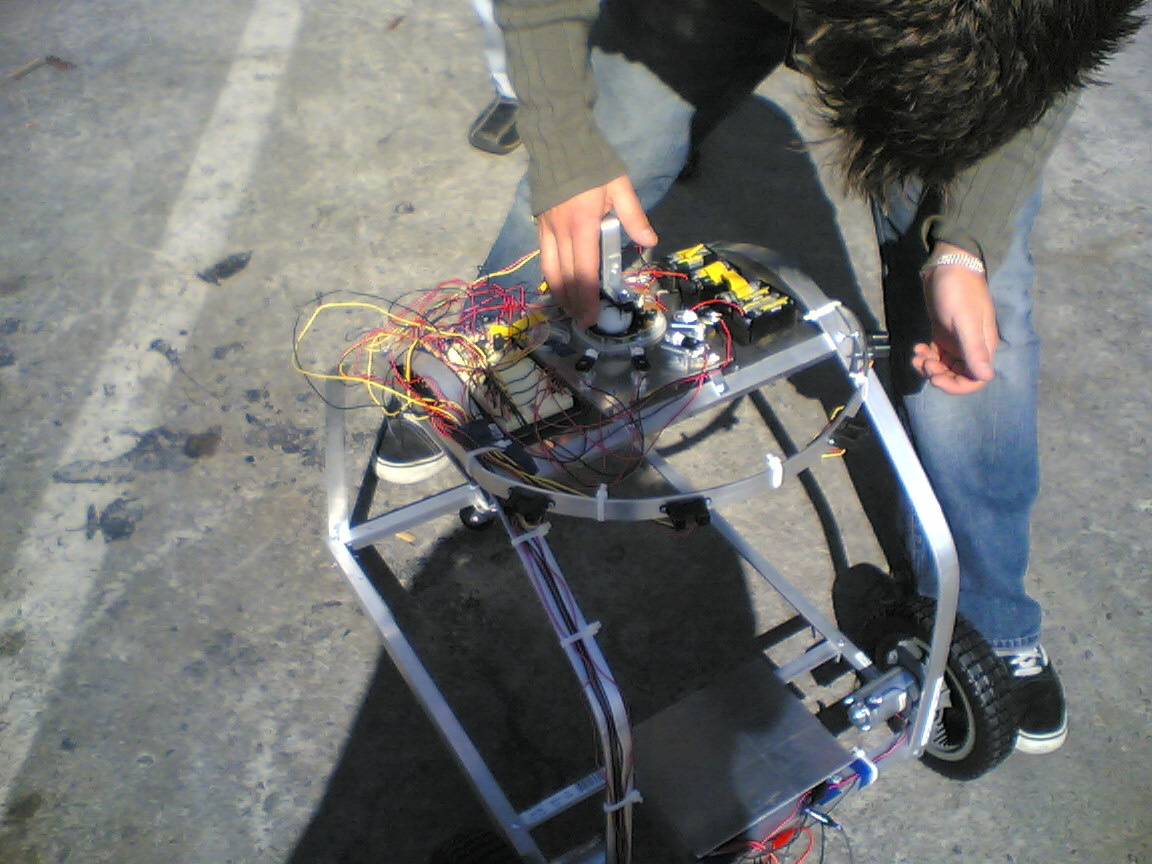
"Cockroach Controlled Mobile Robot" is an experimental robotic system that translates the bodily movements of a living, organic insect into the physical locomotion of a three-wheeled robot. Distance sensors at the front of the robot also provide navigation feedback to the cockroach, striving to create a pseudo-intelligent system with the cockroach as the CPU.
This project is motivated by three key concepts: 1. Biomimetics, 2. The Cyborg, and 3. The Computational/Biological.
Biomimetics is an approach to technological development that looks toward living, organic systems as a source of technical inspiration. Specifically within the field of robotics, cockroaches are admired and used as models for navigation logic and the physical construction of mobile robotic systems. Instead of using a model of an insect, "Cockroach Controlled Mobile Robot" inverts biomimetics by using the real thing.
The Cyborg: Popular culture appears to have a recurring interest in the human-machine and animal-machine hybrid. This project strives to construct a literal cybernetic organism that plays into and off of cultural and scientific visions of synthetic and organic hybridity. Despite the somewhat popular "cyborg" Science Fiction concept, few hybrid robots like this have been built.
Thirdly, the Computational and Biological. This project, in essence, is a robotic system in which a computer-based microcontroller is replaced with a biologically-based insect. In the process, the operating machine highlights key characteristics of being biological. The robot and insect display attributes like unpredictability, laziness, irrationality and emotional response.
These three motivations are embodied in the mobile robot system, a platform that makes the intentions of the insect legible to a wide and diverse audience. Although technically and conceptually complex, the system is easily understood by young and old with little or no explanation. Individuals tend to watch the robot for extended periods of time, empathizing with the insect, and trying to discern whether or not the organism is controlling or being controlled by the technology... and whether it is aware of, immersed in, or pleased by its synthetic and mediated environment.
(also known as "Control and Communication in the Animal and the Machine")
V1 Description
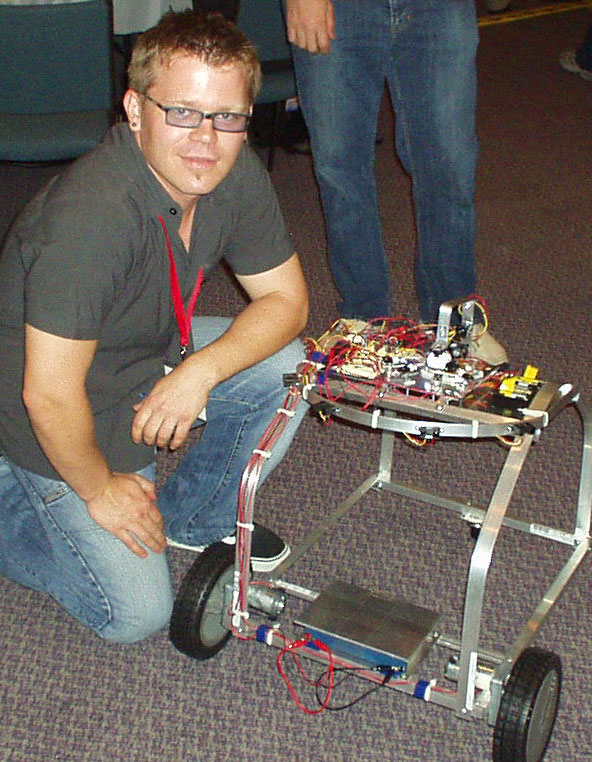
Development of this system began in January 2004. This robot first made a public appearance at SIGGRAPH 2004 (10 Aug 2004) and was publicly shown until December 2004. The system was built at UC Irvine with the patient assistance of Tom Jennings.
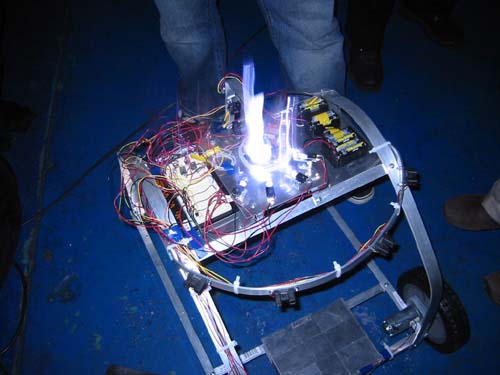
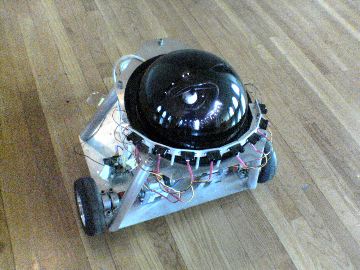
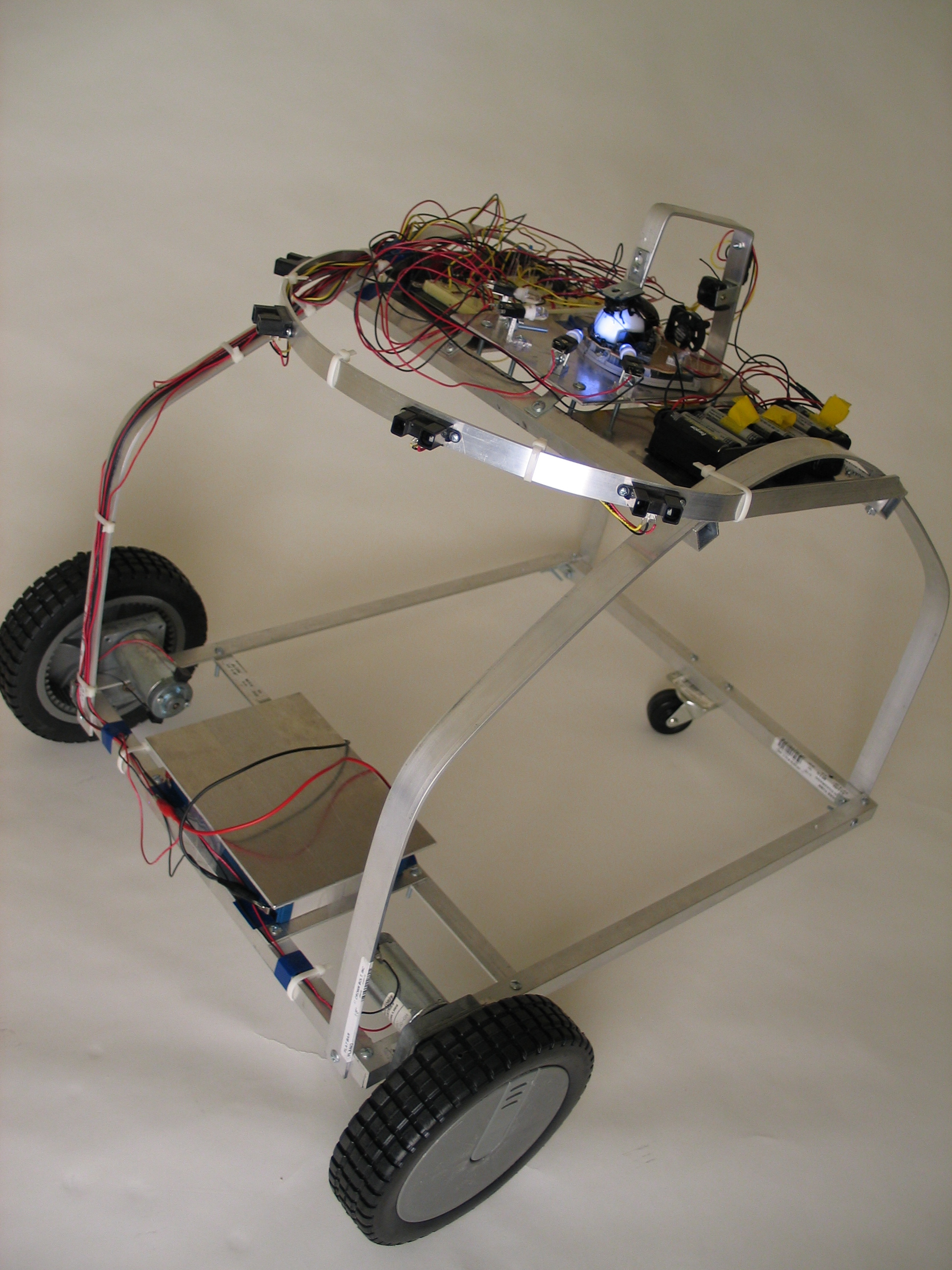
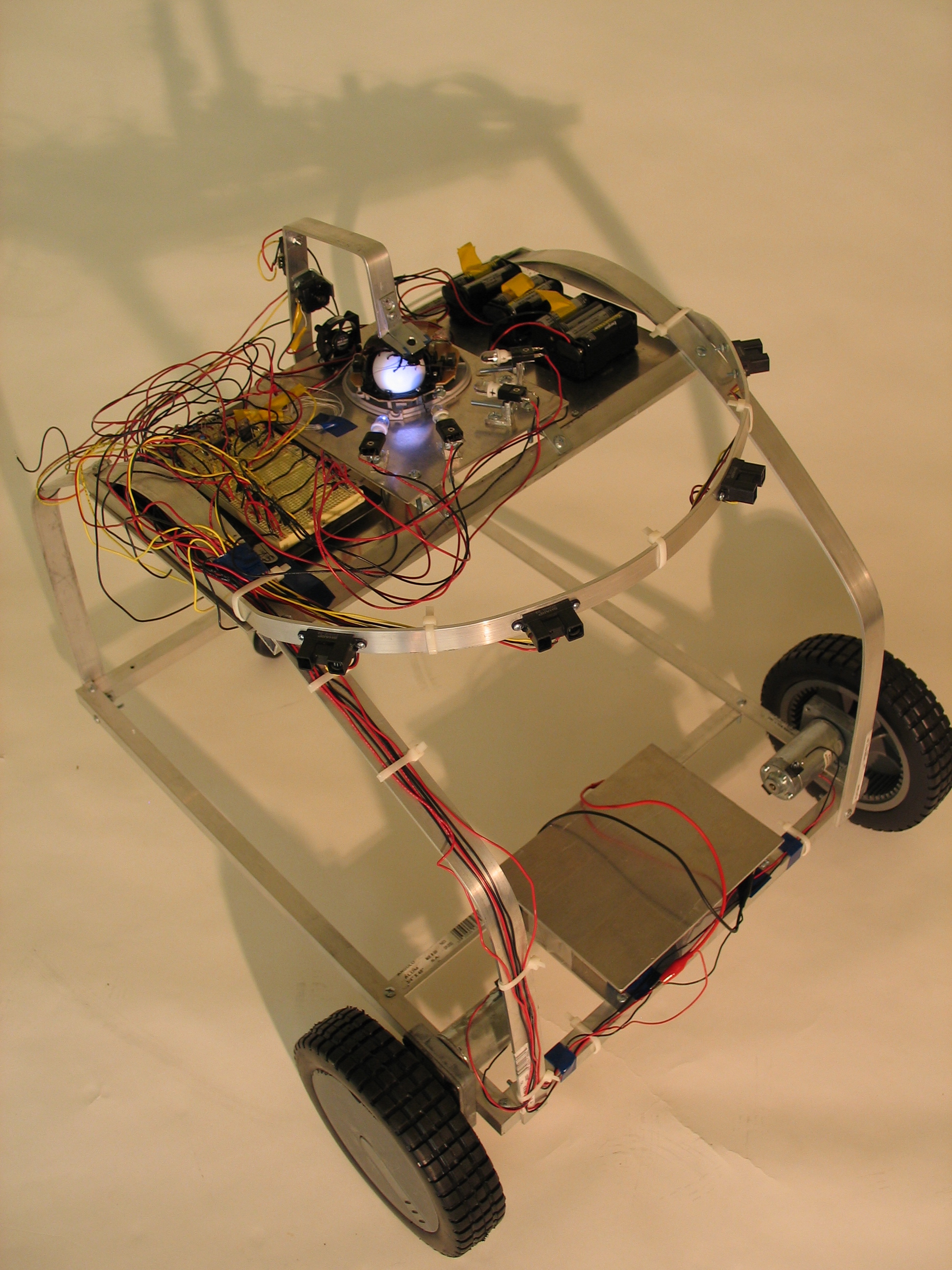
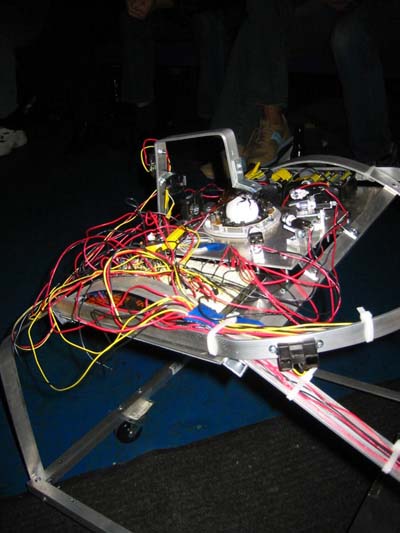
The robot had a lightweight frame and was (from a robotic perspective) a simple mechanism.
Technical summary:
Frame: Lightweight aluminum flatbar and square tube
Drivetrain: Differential drive with wheels attached directly to DC motor axles
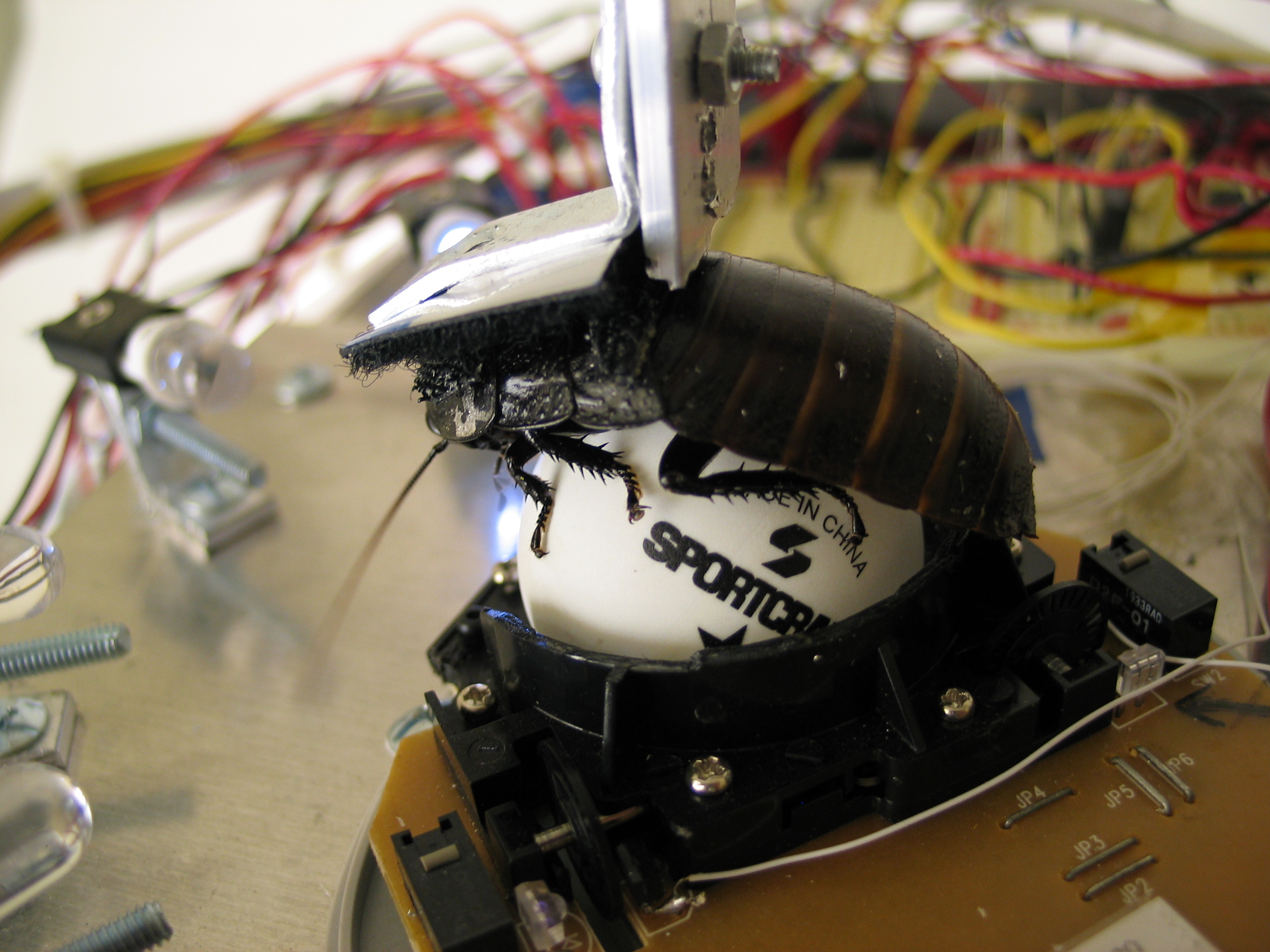
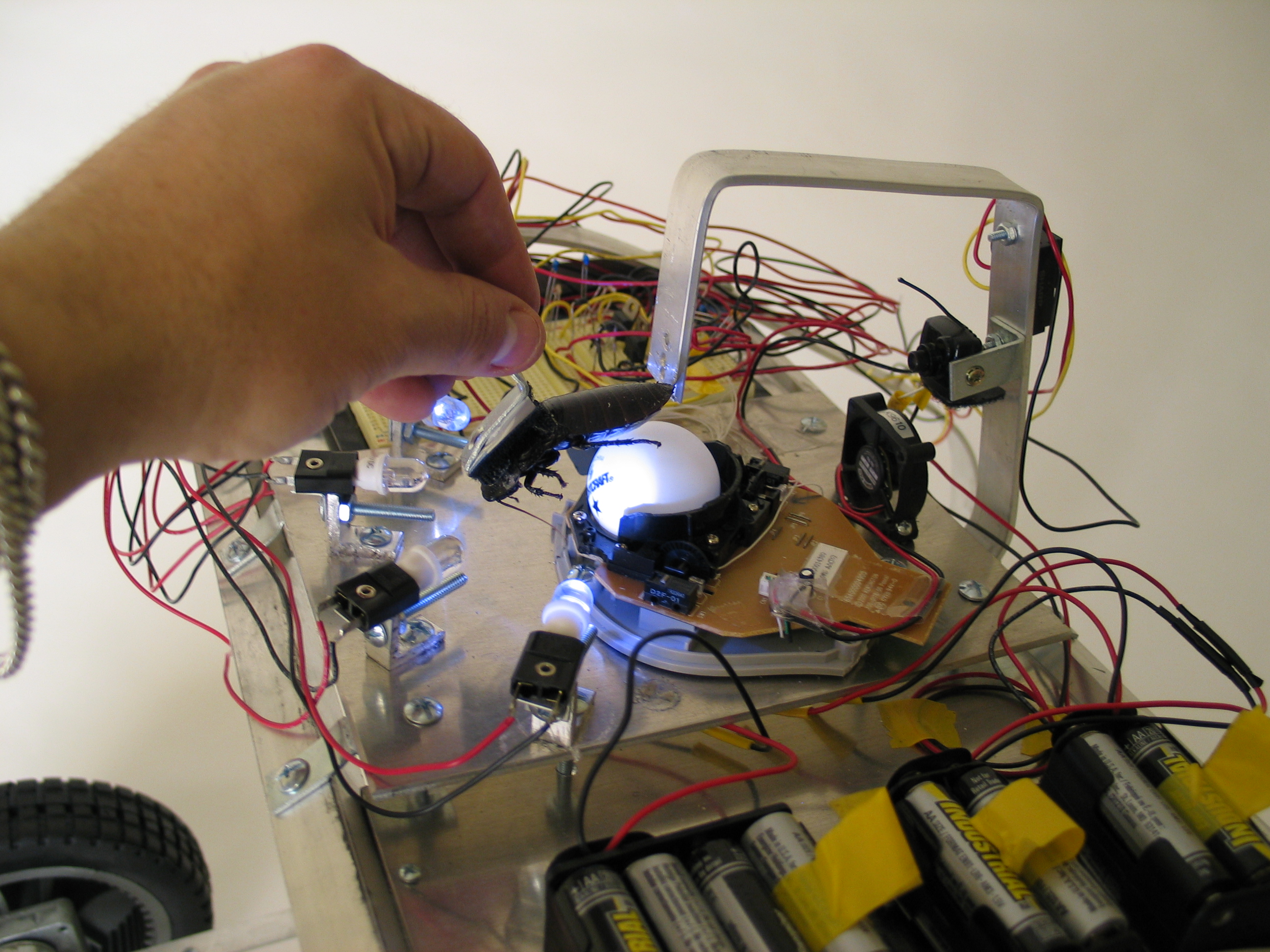
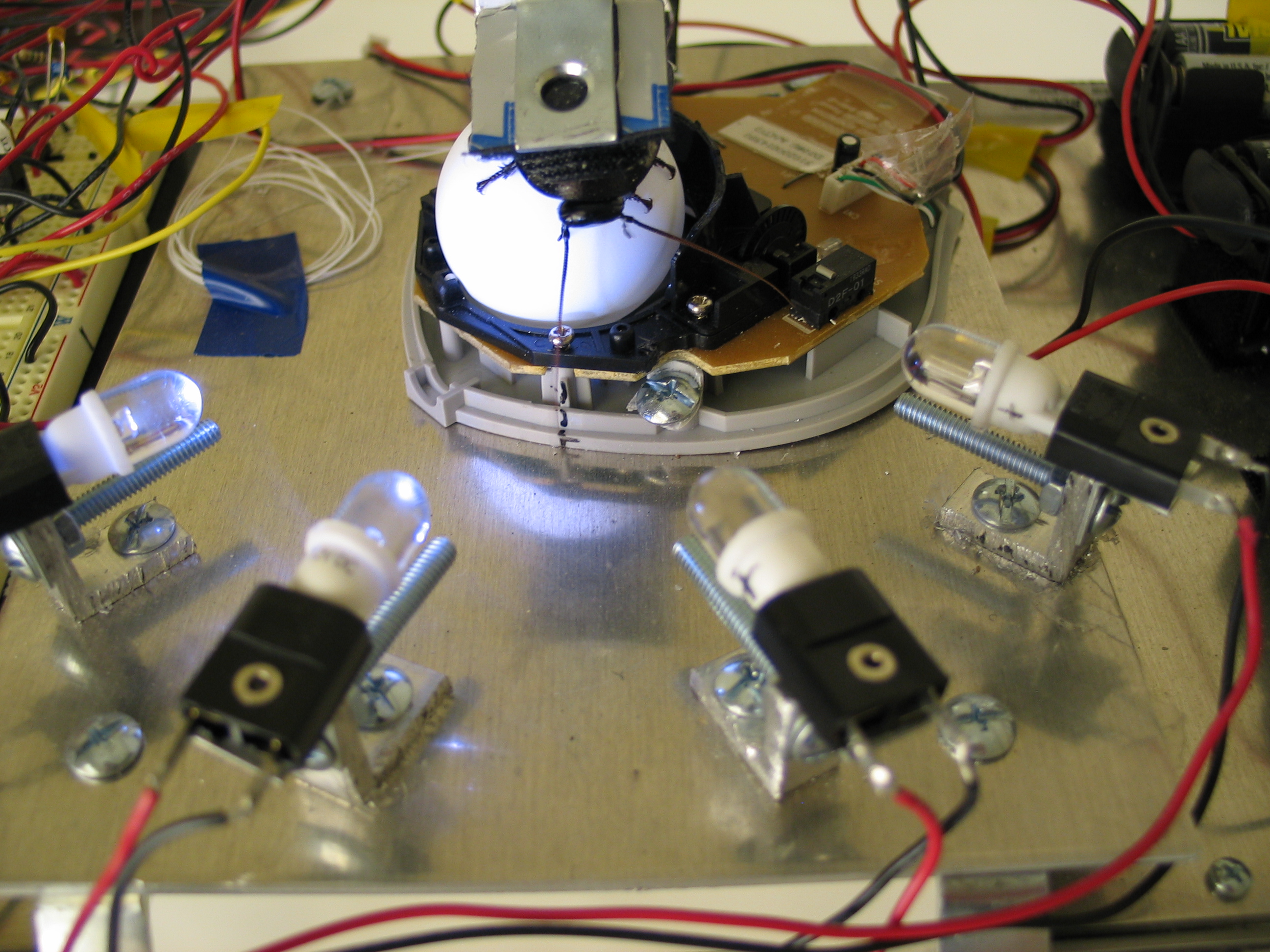
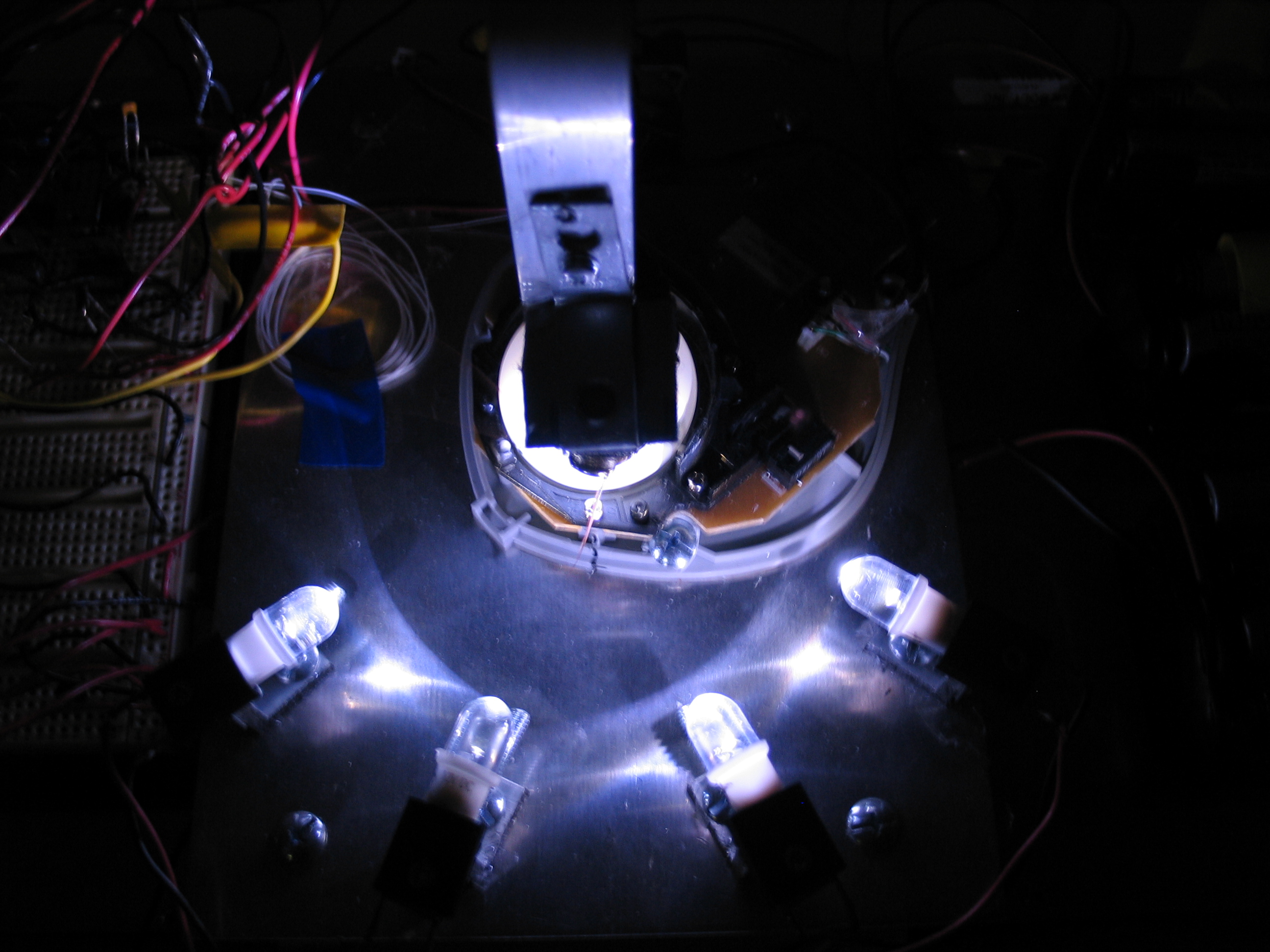
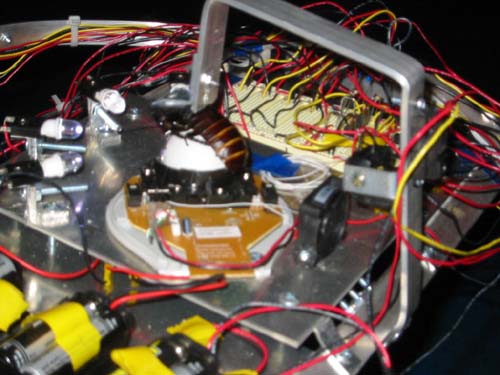
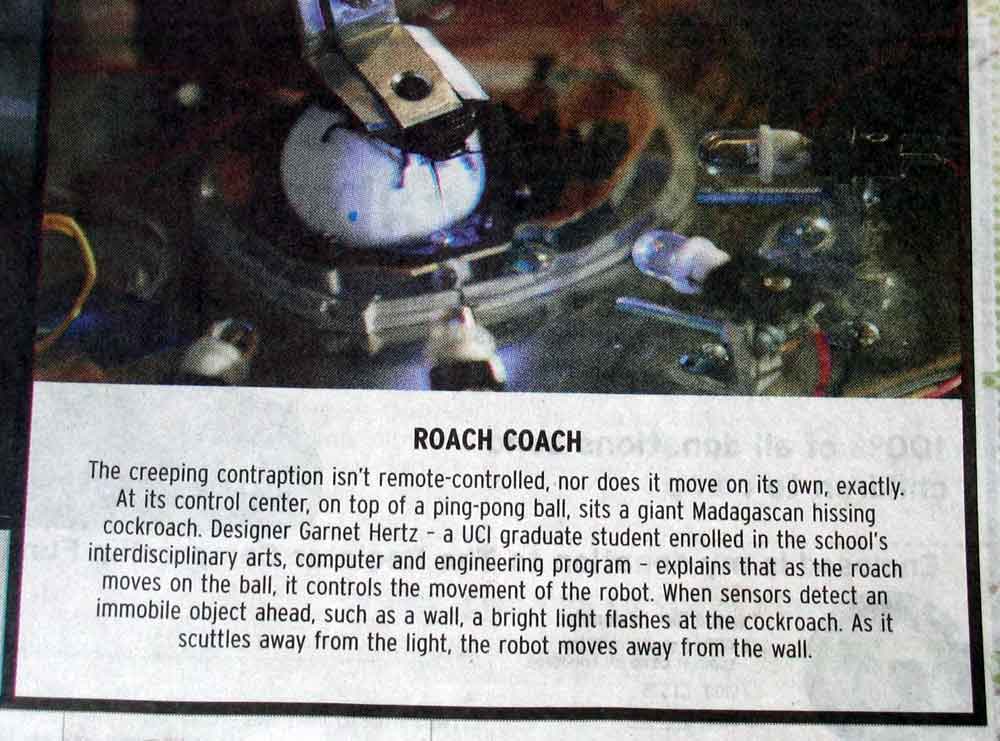
Control: A cockroach was placed atop a modified computer trackball in a special harness. As the insect moved, electrical pulses from the trackball were sent to a circuit that made two motors move.
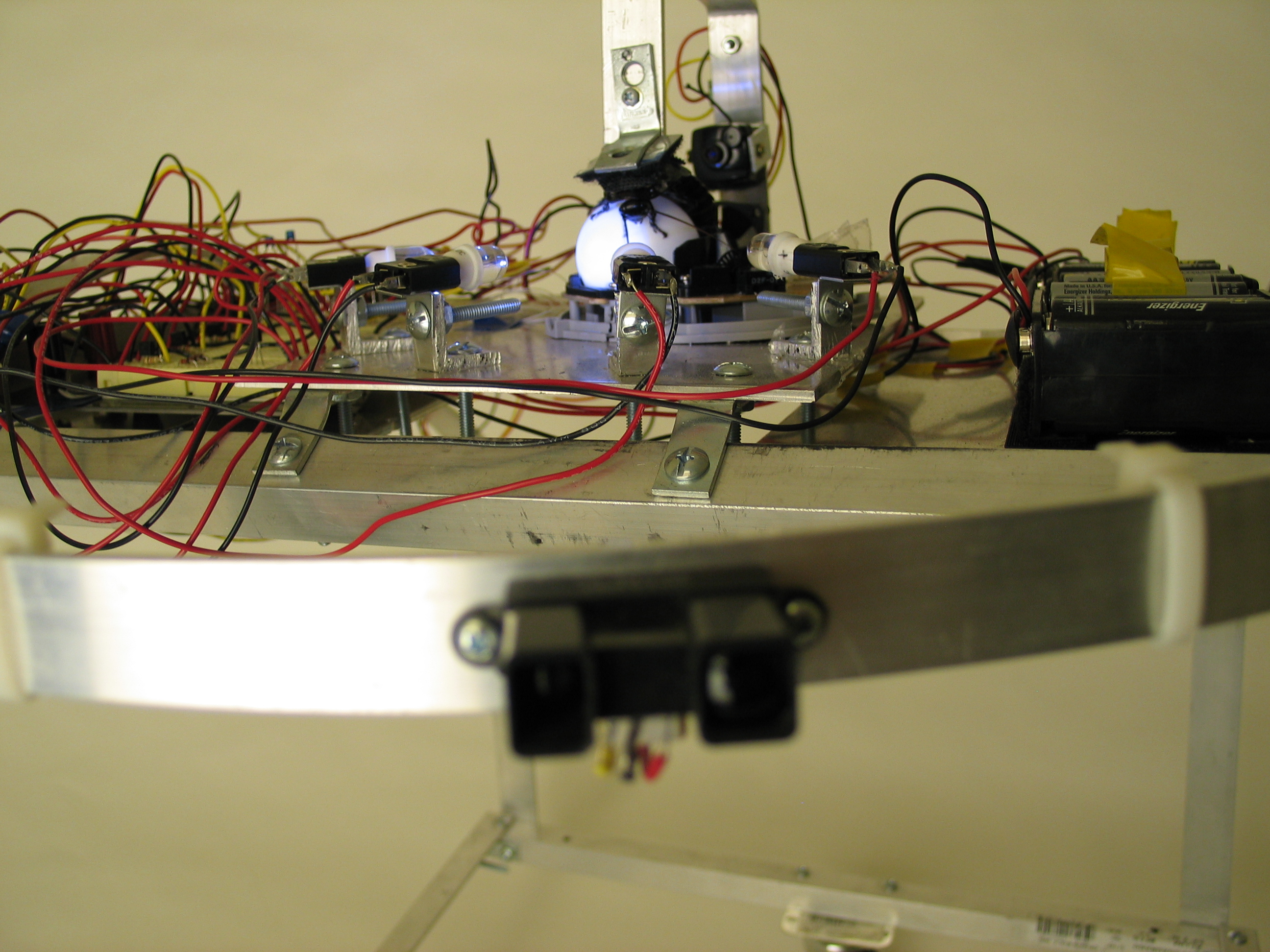
Feedback: Four distance sensors were positioned at the front of the robot to detect potential obstacles. When a sensor was within a close proximity of an object, a bright light would shine toward the insect from the direction of the obstacle. This was designed to work with a cockroach's natural instinct to scurry toward dark places: seeing the light, the cockroach would hopefully turn toward the dark, and in turn, turn the robot away from the obstacle.
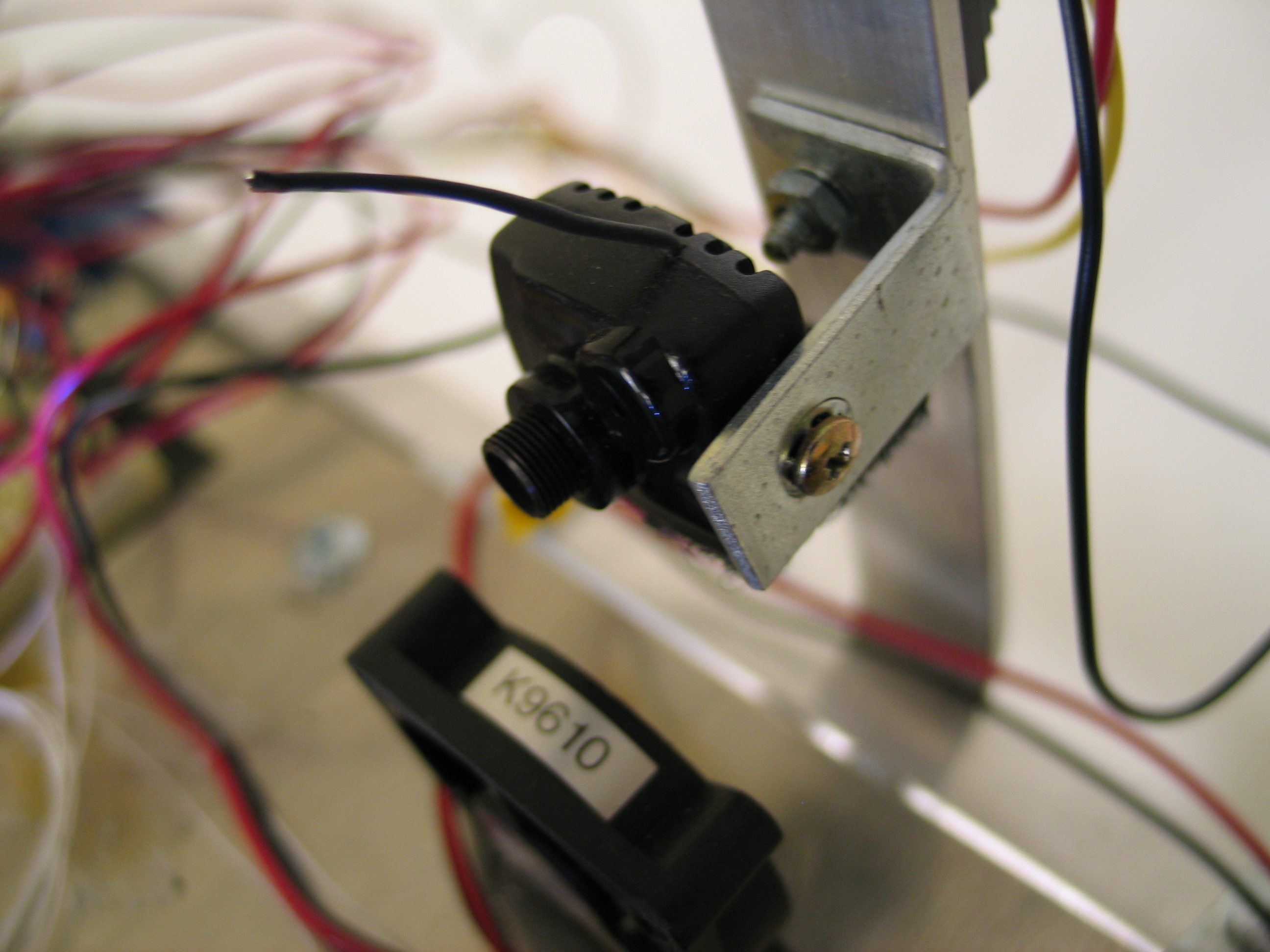
Special features: For a period of time, this robot featured a miniature videcamera that allowed one to get an over-the-shoulder view of the insect operating the robot.
Limitations: This robot could not go in reverse, and the electronics of the system were fragile. The system also lacked many proper electronic design features. The light-feedback system didn't consistently give the desired object-avoidance behaviour... as it turns out, cockroaches are considerably complex insects with a mind of their own.
LIANE HANSEN, host: On the University of California, Irvine, campus, graduate student Garnet Hertz has been hard at work on a new robot design, but there's a bug in the system, literally. Hertz has Velcroed a Madagascar hissing cockroach over a modified track ball that allows the insect to control a high-tech robot rover. Garnet Hertz joins us on the line.
"The Animal-Machine: Biorobotics, War
and Animalized Technologies," Garnet Hertz 2005, in the conference "Defense: Models,
Strategies, Media" at UCI, sponsored by UCI's Visual Studies, Humanities
Center, and Critical Theory Institute (7-9 March 2005).
Audio recording: http://www.conceptlab.com/uci/2004fall/hertz-defense-models-strategies-media-2004.mp3
The lecture is a survey of biomimetic weapons in a critical/cultural
context. Speakers at the conference include Etienne Balibar (UCI),
Wendy Hui Kyung Chun (Brown), Beatriz da Costa (UCI), James Der Derian
(Brown), Garnet Hertz (UCI), Eva Horn (Frankfurt/Oder), Natalie
Jeremijenko (Yale/UCSD), Julian Klein (Berlin), Peter Krapp (UCI),
Trevor Paglen (Berkeley), Claus Pias (Essen), Mark Poster (UCI),
Laurence Rickels (UCSB), Philipp Sarasin (Zurich), Felicity Scott (UCI),
Jens Schroeter (Siegen), Jennifer Terry (UCI), Eugene Thacker (Georgia
Tech), and Brigitte Weingart (Cologne). The paper abstract is as
follows:
Animals inspire the development of technological systems by providing
clever solutions to embodied, complex environments. Biomimetic systems
- technologies that mimic biology - are exploited in the context of war
because they augment military force with animal-machine instinct,
durability, and controllability without the risk of losing "life". The
20th Century has embraced the animal-machine within the context of war,
with current American biorobotics research funded by the Defense
Advanced Research Projects Agency (DARPA) continuing and expanding this
trend. This presentation will provide a visual survey of 20th Century
animal-machine systems, focusing on mechanical-computational weapons
that have been developed as animal-like entities. Critical and
theoretical questions will be raised toward the basis of bioinspired
technological development within this context: between war and the media
of animal-machine hybrids.
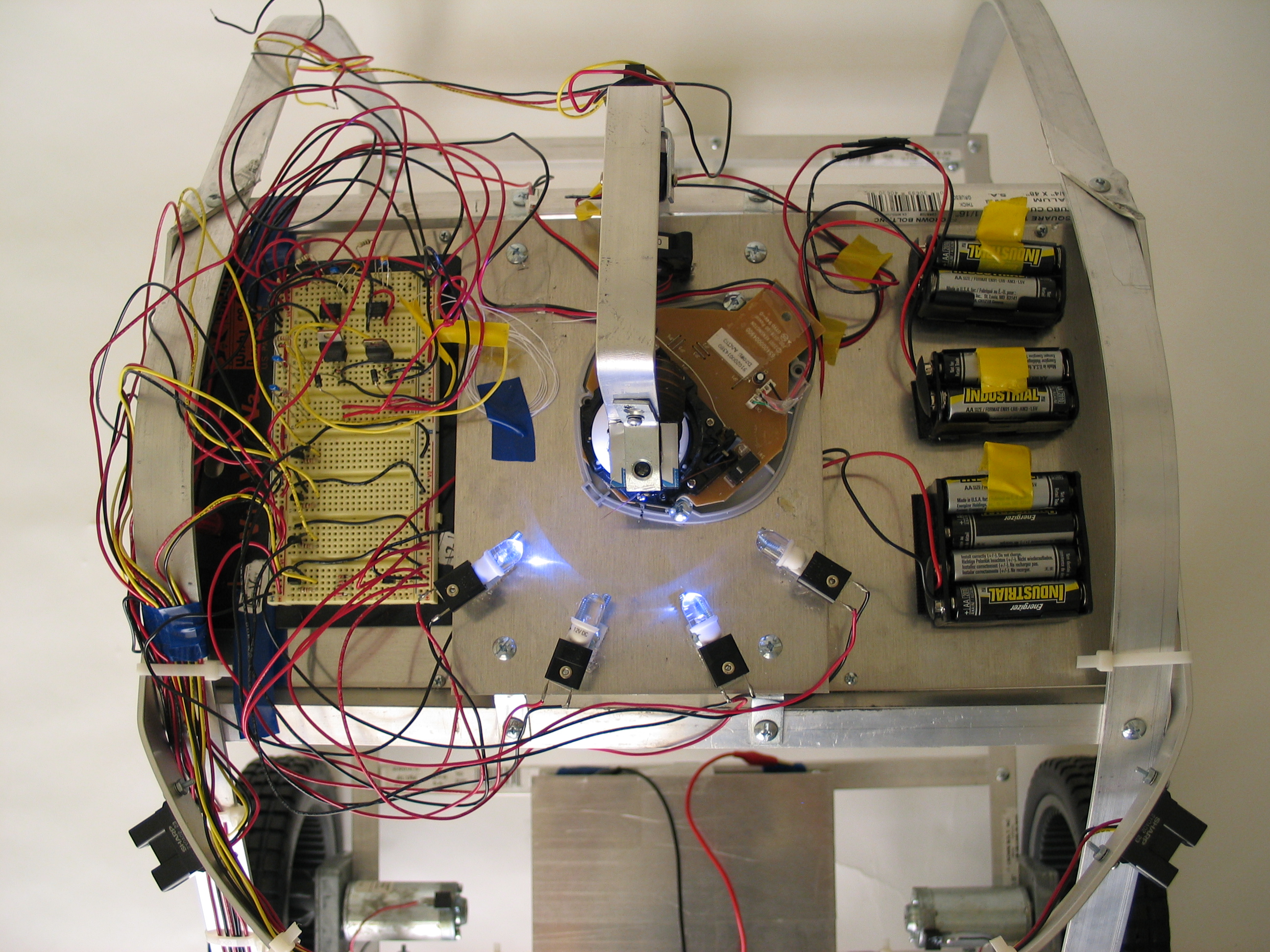
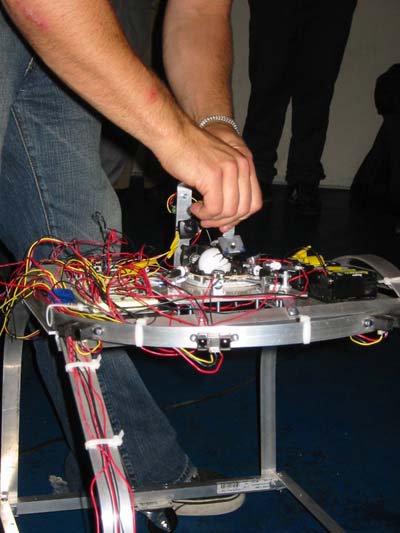
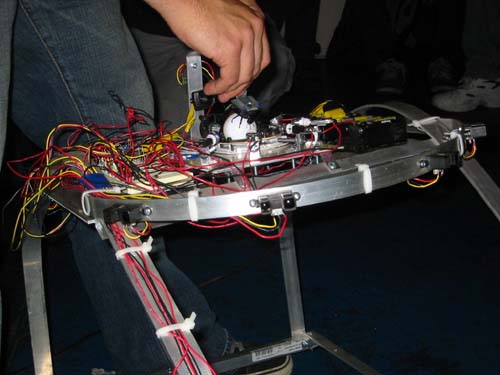
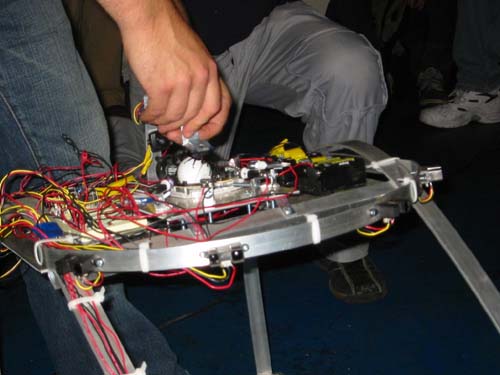
This system was completely redesigned and rebuilt from the ground up in Spring 2005. It operated on many of the same principles as version #1. This version had a new frame that could easily disassemble, aluminum "mag" wheels, better drive system, could go in reverse, had a new harness for the cockroach, and had double the feedback resolution.
Technical summary:
Frame: Aluminum plate and tube, tapped/bolt construction
Drivetrain: Differential drive with Lovejoy drive couplings, pillow block bearings and aluminum "mag" wheels
Control: A cockroach was placed atop a modified computer trackball in a special harness. As the insect moved, electrical pulses from the trackball were sent to a circuit that made the two drivemotors move in forward or reverse. Tecel D200 motor controllers were used.
Feedback: Eight distance sensors were positioned at the front of the robot to detect potential obstacles. When a sensor was within a close proximity of an object, several bright lights would shine toward the insect from the direction of the obstacle. This was designed to work with a cockroach's natural instinct to scurry toward dark places: seeing the light, the cockroach would hopefully turn toward the dark, and in turn, turn the robot away from the obstacle.
Special features: This version of the robot featured two domes (smoked and mirrored finishes) that fit over the insect/control system to block out external light. Dozens of behind-the-scenes improvements were made to the robot including vast improvements in the electrical system.
Limitations: Although much more electrically rugged, the light-feedback system still didn't consistently give the desired object-avoidance behaviour... as it turns out, cockroaches are considerably complex insects with a mind of their own.
2005 July 15-17 : ArtBots 2005 in Dublin Ireland, part of the Ark's Save The Robots Festival. The curators
were: Douglas Repetto (Columbia University Computer Music
Center), Michael John Gorman (Stanford/The Ark), and Marie Redmond
(Trinity College Computer Science).
Won Audience Choice Award at ArtBots 2005 in Dublin, Ireland on July 17th 2005.
Cockroach Controlled Mobile Robot #3
V3 Description
This version kept the frame, rear wheel, cockroach harness, distance sensors and D200 motor controllers, but replaced the light-feedback display, drivetrain, wheels and axles. This work was done in August 2005.
Technical summary:
Frame: Aluminum plate and tube, tapped/bolt construction (same at v2)
Drivetrain: Differential drive with "Barbie Sunjammer" motors and drive collars, 10 inch pneumatic tires with non-driving steel axle
Control: A cockroach was placed atop a modified computer trackball in a special harness. As the insect moved, electrical pulses from the trackball were sent to a circuit that made the two drivemotors move in forward or reverse. Tecel D200 motor controllers were used. (same at v2)
Feedback: Eight distance sensors were positioned at the front of the robot to detect potential obstacles. When a sensor was within a close proximity of an object, several bright lights would shine toward the insect from the direction of the obstacle. This was designed to work with a cockroach's natural instinct to scurry toward dark places: seeing the light, the cockroach would hopefully turn toward the dark, and in turn, turn the robot away from the obstacle. Version #3 featured large-ish green LED panel-blocks as a display for the insect.
Special features: This version has longer battery life that v2, is quicker to assemble, and its green-panel-LED display system is more interesting (for humans) to watch. In addition to v1 -> v2 electrical improvements, v3 featured auto-resetting fuses and more diagnostics (indicator lights) built into the system.
Limitations: Still, the light-feedback system still doesn't consistently give the desired object-avoidance behaviour... as it turns out, cockroaches are considerably complex insects with a mind of their own.
Cockroach Controlled Mobile Robot #3 was demonstrated in conjunction with
the IEEE International
Conference on Sensors on Tuesday November 1st 2005. The IEEE (Institute of Electrical and Electronics Engineers) conference was at UCI, with demos occuring at the California Institute of Telecommunications and Information Technology.
University of California Irvine, Engineering. Guest lecture/demo in Beatriz da Costa's EECS129 class at UCI on Feb 13th 2006.
University of California Irvine, Dance. Guest lecture/demo in Lisa Naugle's class at UCI on Feb 27 2006 at 1:30pm.
Gave a demo of the roachbot to an advisor of Arnold Schwarzenegger at Calit2 on Feb 9 at 1:30pm.
Guest lecture/demo in Lisa Naugle's class at UCI on Feb 27 at 1:30pm.
STRP Festival in Eindhoven Netherlands from March 23-26 2006. The theme of the robot-oriented show is "We Are The Robots", with a presentation by Karl Bartos of Kraftwerk.
Gave a lecture and demo of the system at dorkboteindhoven in Eindhoven, Netherlands on Sunday March 26th 2006.
Gave a lecture/demo of the system at UCSD's ICAM (Interdisciplinary Computing and the Arts Major) Lecture Series on April 13th 2006 from 6 to 8pm. This lecture series is organized by Brett Stalbaum of C5.
The project will be developed in some new lab/studio space in the new Calit2 building at UCI in Feb 2006. Thank-you to Lisa Naugle, Albert Yee and the folks at Calit2 for their support. The building can be seen via webcam.
February 2 - March 17, 2007: Exhibited with Amy Youngs and Ingrid Bachmann at InterAccess (Toronto, Canada).
InterAccess is pleased to present ZOO, an exhibition of three works by three artists that artfully integrate natural and artificial life, colliding the realm of living things with the genre of creative electronics. Artists Ingrid Bachmann, Garnet Hertz and Amy Youngs explore the complex relationship between technology, culture and nature. This exhibition includes a cockroach-controlled robot, a holodeck for house crickets and hermit crabs that surf the net.
October 16th 2008 - The cockroach controlled mobile robot was demonstrated at the University of Southern California for Steve Anderson's Interactive Media class on Thursday, October 16th 2008 in the Ron Howard Screening Room of the Robert Zemeckis Center for Digital Arts. Steve Anderson made a brief blog post about the demo: "Mechanical Cockroach stalks Zemeckis Center."
December 2008 - Documentation of robot shown at Studio D'Ars Oscar Signorini Prize Exhibition, with Haakon Faste and Shih Chieh Huang.
Curated by Cristina Trivellin and Martina Coletti, Milan, Italy.
Roachbot #3 appeared in a documentary on TV Tokyo on October 29th 2006. The crew - including director Ryo Nishida - came from Tokyo to shoot the robot on November 28th 2005.
Humans constantly strive to transcend their limitations and become more than they were. Our story starts, not with wheelchair-bound people learning to walk with exo-skeletons in Japan, but with electronically assisted giant cockroaches in California.
"Roboter: Geschichte, Technik, Entwicklung" (German), "Robots. Genese d'un peuple artificiel" (French), and "Robots: From Science Fiction to Technological Revolution" (English) by Daniel Ichbiah, Knesebeck Verlag / Editions Minerva (2005).
Hybrid: Living in Paradox (Exhibition Catalog)
Gerfried Stocker & Christine Schöpf (eds), Hatje Cantz, 2005.
Animal Controlled Computer Games.
Wim van Eck and Maarten H. Lamers, Springer Berlin / Heidelberg (2006).
"Biocomponents: Bringing Life to Engineering" in Ingenia (Issue 27).
Peter Moar, The Journal of the Royal Academy of Engineering (2006).
"Our historical fascination with cyber-robotic creatures and devices is beginning to manifest itself in unforeseen ways. Taking these hybrid forms to an extreme is Canadian artist Garnet Hertz's unique mobile robot. The project examines the tension between mechanized systems and the natural beings that control and operate them. Hertz's work places a live, Madagascan hissing cockroach atop a modified trackball so that when the bug moves, it controls the speed and direction of the three-wheeled robot it is perched upon. An array of LED panels stimulate the roach's sensory inputs to direct it towards or away from obstacles. If developed further, the project could point to connections between animal and machine interfaces that could lead to improved services, such as search and rescue applications. Hertz's hybridization of "insect and machine" creates a compelling examination into the future of autonomous natural systems that have the potential to augment and strengthen our relationship to, and dependency on, other living creatures to survive."
VIDA 9.0 is the eighth edition of an international competition created to reward excellence in artistic creativity in the fields of Artificial Life and related disciplines. We are looking for artistic projects that address the interaction between "synthetic" and "organic" life, as well as innovative projects that further develop the field of Artificial Life. In previous years prizes have been awarded to projects that included autonomous robots, avatars, recursive chaotic algorithms, knowbots, cellular automata, computer viruses, virtual ecologies that evolve with user participation, and works that highlight the social side of Artificial Life."
Cockroach Controlled Mobile Robot won the XXV Oscar Signorini Prize in December 2008. For more information, see http://conceptlab.com/roachbot/v3-signorini/. As a part of this, documentation of Cockroach Controlled Mobile Robot
was exhibited between December 16th and 22nd 2008 in the D'Ars Studio in Milan, Italy. A solo exhibition at the D'Ars Studio in Milan is forthcoming in 2009.
How does the cockroach move the robot?
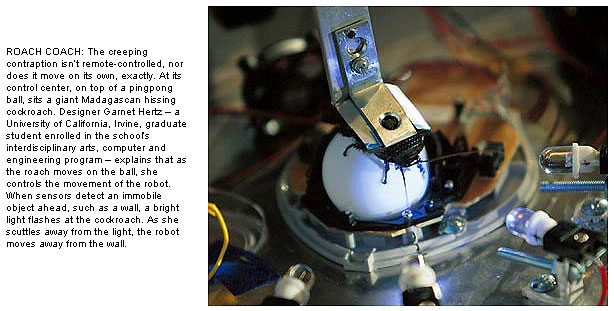
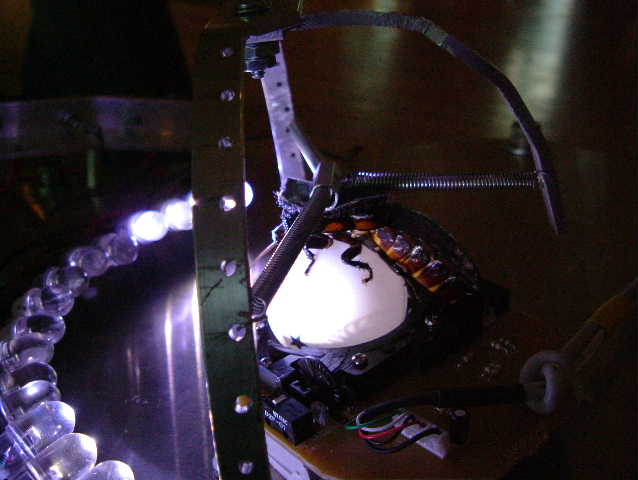
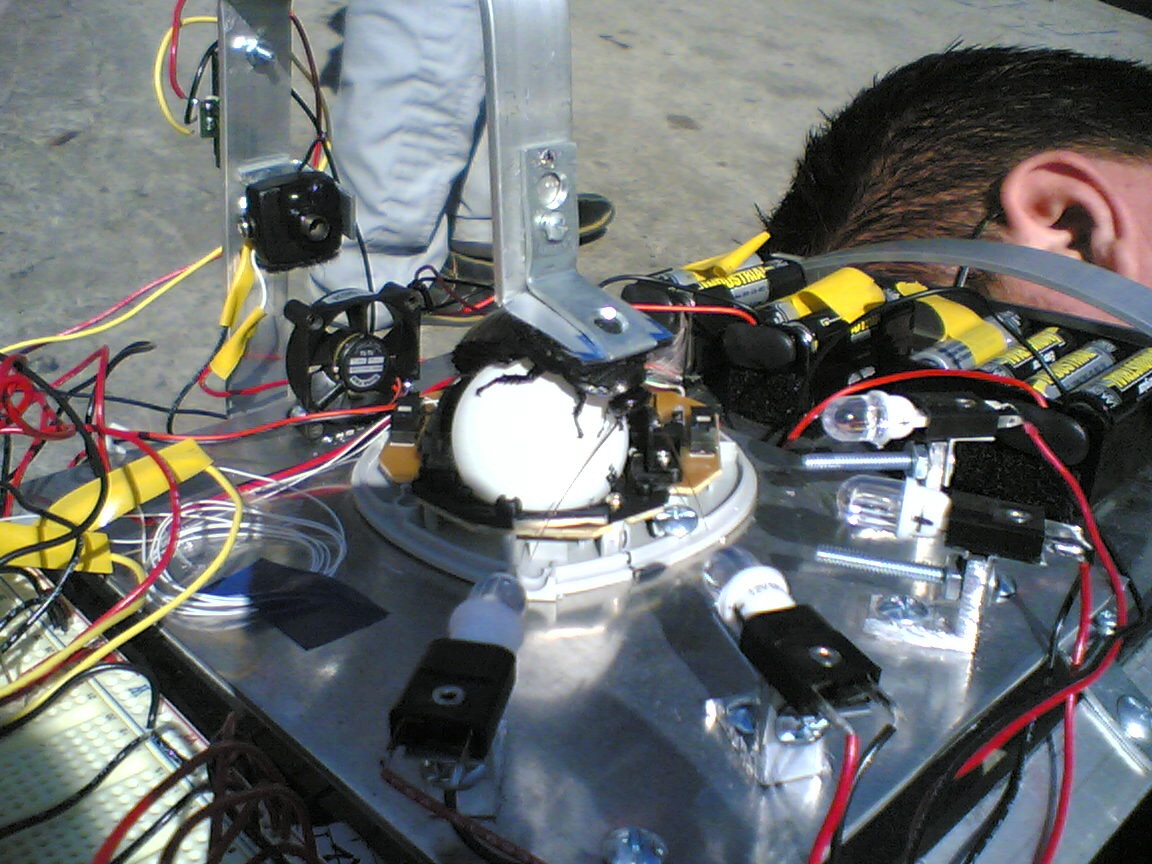
The cockroach is placed on top of a modified trackball - a computer-mouse-type device - that is hooked up to some electronics. The cockroach is held gently in place above the ball so that when the cockroach moves it makes the ball spin: a little bit like a two-dimensional treadmill. The electronics (optical encoders) within the trackball send out small electrical pulses to some electronics that make the motors move in a similar direction to where the cockroach is moving on the ball.
What do the lights do?
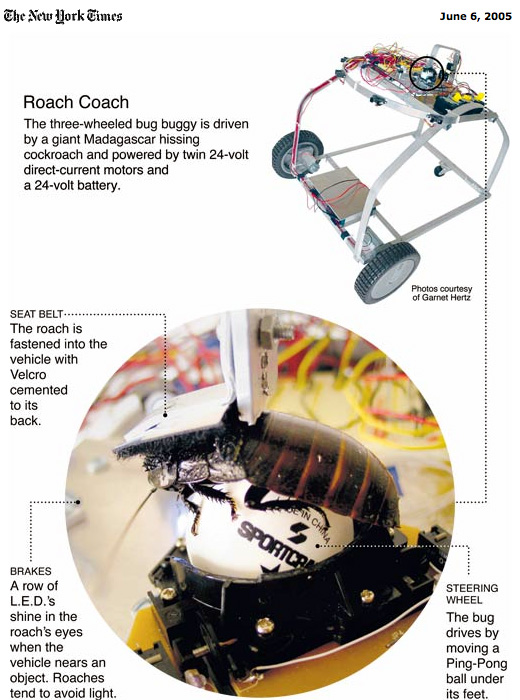
The lights encircle the front of the insect, and are designed to help the cockroach navigate the object away from obstacles. In theory, cockroaches don't like light: as you may know, cockroaches scuttle quickly underneath the refrigerator if the light is turned on when you catch them in your kitchen at night. The lights around the front of the cockroach control center are each hooked up to a distance sensor. As the robot approaches a wall, for example, the distance sensor will detect that something is close, and will send electricity to the light. The light will turn on, and will alert the cockroach before it crashes into the wall. The idea is that the cockroach will want to scuttle into a "dark" under-the-fridge-type region, and therefore steer the robot into a clear space.
Have you noticed the cockroach change its behavior because it's in the machine? How has it adjusted?
At some moments, it appears as if the cockroach is "adapting in" to the system. In other words, behaving in a way that would indicate that it thinks that the robot control system is "real". There are other times that it appears the cockroach couldn't care less about the lights shining toward it and seems to enjoy driving the robot directly into walls at full speed.
Does the cockroach control the system better than a computer would?
At this point, likely not - but it depends on how you define "better".
Do you have a computer or microcontroller on the system that is controlling the robot?
No. The system has no microcontrollers or "computers". The electronics are composed of two optical encoders, four analog infrared sensors, six transistors, two 555 timing chips, and some resistors.
The Cockroach On The Robot
Does the cockroach live on the robot?
No. The cockroach is temporarily put into position at the driver's seat of the robot, and is removed after the demonstration is done. The cockroach typically stays on the robot for about 10 to 20 minutes, and then is removed and is returned to its terrarium home.
How does the cockroach stay on top of the trackball?
The cockroach is held in place with a piece of velcro. There is a small patch of velcro on the cockroach's back (cuticle) and a matching piece on the robot. The piece of velcro on the cockroach is held in place with cyanoacrylate adhesive, and is cut in sections to not interfere with normal daily life, mobility or body flexion. The cuticle on the back of the insect is like your fingernail, and having two small pieces of velcro affixed to the back of the insect appears to have no adverse effects to its quality of life. It is important to note that the cockroach is not bolted or surgically affixed on top the trackball.
Life as a Cockroach
What kind of insect is it?
It's a Giant Madagascan Hissing Cockroach, also known as Gromphadorhina portentosa. The insect has no wings, moves relatively slowly and grows to a length of 5 to 8 cm. The lifespan of the insect in between two to five years. The females give birth to live nymphs (20-60) after 60 days of gestation, and they reach full maturity at 7 months. The insect is native to Madagascar, and leaf litter on the forest floor is its native habitat. Madagascan Hissing Cockroaches emit a loud hissing sound when agitated: it does this by forcing air out of a pair of modified spiracles in its abdomen.
Does the cockroach have a brain?
No. Cockroaches only have clumps of nerve cells called ganglia, which are positioned around their body. Cockroaches can survive for a number of days without their heads: they eventually starve to death.
Are there any legal, research, or technical restrictions with using cockroaches like this?
To the best of my knowledge, Gromphadorhina portentosa are not considered a pest insect in the state of California and there are no restrictions in raising, breeding, or keeping these cockroaches. From a scientific research perspective, cockroaches are not subject to the technical framework of a university animal research committee: animal research committees - who oversee university research involving animals - usually only care if you're doing work with vertebrate animals. For more on this topic, see my paper titled Ethology of Art and Science Collaborations: Research Ethics Boards in the Context of Contemporary Art Practice (10 pages, 60K PDF File). Images related to this paper can be found at
http://www.conceptlab.com/ethology/.
Similar Research
Do you know of other similar art projects that use animals to control mechanisms?
Yes. In particular, two projects come directly to mind: Mark Pauline's Guinea-pig-operated 4-legged walking robot, and Ken Rinaldo's "Delicate Balance": a robotic system controlled by living siamese fighting fish.
Mark Pauline - founder and director of Survival Research Labs - built a guinea-pig-operated 4-legged Walking Machine that was operational between 1983 and 1985. It featured an on-board guinea pig that controlled the leg movements of the robot. From my recent conversations with Mark, he described that the guinea pig was trained to drive the machine by rewarding him ("Stu", as he was named) with lettuce. Although Stu was trained to enjoy entering the robot, during operation Stu would tend to position himself in a way that the machine wouldn't move. Video of this machine can be seen in the Survival Research Labs video "A Scenic Harvest from the Kingdom of Pain" available for purchase at http://srl.org/video/
Ken Rinaldo's "Delicate Balance" is a device with four fish bowls each containing one siamese fighting fish. These bowls were hung from two trusses that were controlled by the fish's body movements, and played with the natural response of the fish attempting to threaten or attack fish in adjacent (separate) bowls. More information about this project can be seen at http://accad.osu.edu/~rinaldo/works/mediated/
Are you familiar with similar projects done in a scientific context?
Yes. This work is directly inspired by scientific research in biorobotics: in particular the remote-controlled cockroach work at the Shimoyama Lab at the University of Tokyo in collaboration with Raphael Holzer. Within this project, the team was attempting to control the movement of a cockroach by implanting electrodes into their antennae. An Associated Press story that gives an overview of the research can be found at http://www.intercorr.com/roach.htm with the published paper titled "Behavioural Response of Insects to Electric Stimulation (Control of Insect Motor Function)" available at http://dmtwww.epfl.ch/~rholzer/papers/cbs.article.pdf with diagrams at http://dmtwww.epfl.ch/~rholzer/papers/cbs.ohp.pdf.
Rationale and Goals of this project
Why was this project initially called "Control and Communication in the Animal and the Machine"?
In 1948, Norbert Wiener published a book titled "Cybernetics: on Control and Communication in the Animal and the Machine" in which he coined the term "cybernetics". He used this term to describe the science of transmitting messages between humans and machines, or from machine to machine. Wiener saw human communication as a model for human-machine and machine-to-machine interactions, and that the quality of these communications influenced one's inner well-being: especially in a society in which people increasingly interact with and are reliant on machines. As the term cybernetics stems from the Greek kybernetis meaning "steersman", the process of designing machines that effectively respond to us is important and has direct impact on our social condition. This project somewhat takes Wiener's title literally: it's interested in control and communication in the animal and the machine. It's also interested in the history and social impacts of cybernetic theory within contemporary culture: especially hybrid bio/machine systems.
What do you think about "hard" artificial intelligence or artificial life?
In one word: boring. The quest for artificial intelligence or artificial life might be more interesting if it was less artificial.
Special thanks to Tom Jennings throughout the development of this project.
Thanks to Amelia Guimarin for her help in Eindhoven NL (March 2006) and for demonstrating the system at the University of Southern California (October 2008).
Thanks to Mark Warner for donating insects during the Artbots 2005 show in Dublin.
Website hosting & bandwidth for this project has been donated by draganfly.com.
The notion of Embodiment is critical to any theorising of digital arts and cultural practices. This is because the Cartesian dualism and the privileging of an abstract and disembodied notion of mind is axiomatic to computer science. Contrarily, arts and cultural practices are, traditionally, holistic embodied practices which depend upon perception, often active perception. We must recognise that at a basic level, there are two dissimilar, though not contradictory, usas of the term 'embodied' in the literature. One referes to the nature of human embodied being, the other refers to physically instantiated quai-intelligent machines: robots. Along with 'embodiment', several key terms join many of these papers. These include: situation, emergence, and intentionality.






















 How does the cockroach move the robot?
How does the cockroach move the robot? What kind of insect is it?
What kind of insect is it?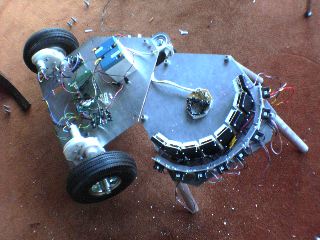

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}